前五期,我们通过讲述 JETI DS24(点击购买)的常用入门知识,让大家对 JETI 的软硬件有了一个比较全面的认识,从本期开始,我们将进行进阶教程的介绍。
入门篇回顾
第一期:【JETI从入门到精通】入门篇之接收机对频
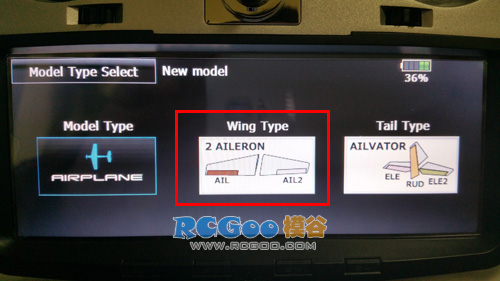
第二期:【JETI从入门到精通】入门篇之新建模型
第三期:【JETI从入门到精通】入门篇之硬件调整
第四期:【JETI从入门到精通】入门篇之设备升级
第五期:【JETI从入门到精通】入门篇之常用设置
本期,我们讲述飞机调试中,最重要的一个环节:通道(舵机)参数设置。通过该项设置,可对各通道输出参数进行调整,以达到调整飞机各舵面或通道正常工作的目的。
点击 Menu 按钮,选择"Model(模型)"菜单,进入"Servo Setup(舵机设置)"。

进入"Servo Setup(舵机设置)"后,我们先来对各项设置参数进行简单的介绍。

"Servo No.(舵机通道编号)":通过点击 3D 旋钮,选中该项,并旋转 3D 旋钮可选择通道。亦可通过点击屏幕下方 F2、F3 按钮进行切换。
"Subtrim(中立点微调)":当通过机械调整,舵臂仍无法回中时,可通过该项进行调整。
"Max positive/negative(最大正/负行程)":调整通道输出最大值,混控或其他通道参数调整功能不受此项参数影响。
"Max positive/negative limit(最大正/负行程限制)":调整通道输出最大绝对值,任何混控和其他通道参数调整均受此项参数影响。
"Reverse(正反向)":调整通道正反向。
"Delay positive/negative(正/负延迟)":调整通道延迟,常用于襟翼、舱门舵机等需要较缓慢速度的通道。
"Servo balancer(舵机平衡器)":精细调整通道输出曲线,常用于双舵机同步设置。
下面,我们就以上设置,进行详细介绍,"Servo No.(舵机通道编号)"、"Reverse(正反向)"、"Delay positive/negative(正/负延迟)"相对设置简单,这里我们将不再阐述。
Subtrim
(中立点微调)

当通过机械调整后,舵臂仍无法回中时(下图①),旋转 3D 旋钮,选中"Subtrim(中立点微调)",点击 3D 按钮,并转动,调整参数(上图),使舵机回中后(下图②),再次点击 3D 按钮确认。

Max positive/negative
(最大正/负行程)

该项,可调整通道(舵机)最大输出行程,且混控和其他通道参数调整功能不受此设置影响。如上图①、③所示,当选中的参数设置为"正负100%"时,下图①、③舵机角度都为160度。将上图②、④选中的参数设置为正负50度时,下图②、④舵机角度为50度。

Max positive/negative limit
(最大正/负行程限制)
该设置方法和设置目的和"Max positive/negative(最大正/负行程)"选项相同,但该项设置将会限制最大行程,且任何混控和其他通道参数设置无法逾越。我们以混控为例,讲解该设置对混控的影响。
点击 Menu 按钮,选择"Fine Tuning(微调)"菜单,进入"Free Mixes(自由混控)"。

进入"Free Mixes(自由混控)"后(该功能后期会进行详细介绍,本期将不做阐述),点击屏幕下方 F2(Add) 按钮,进入混控设置页面(下图①),选择 "From"为"Rudder(方向)","To"为"Elevator(升降)",并将"Master Value(主值)"调整为"100%",点击屏幕下方 F5 按钮,保存后,返回"Free Mixes(自由混控)"页面(下图④)。

该混控将方向舵与升降舵进行联动,当调整升降舵通道"Max positive/negative limit(最大正/负行程限制)"时,无论混控"Master Value(主值)"为多大时,将不可超过"Max positive/negative limit(最大正/负行程限制)"所设置的值。

如上图所示,当"Max positive/negative limit(最大正/负行程限制)"为"正负125%",混控"Master Value(主值)"为"100%"时,舵机角度均可达到165度(下图所示)。

设置"Max positive/negative limit(最大正/负行程限制)"值为"正负40%",混控"Master Value(主值)"为"100%"。

此时,舵机角度将受该参数影响,缩小至50度。这时,无论将混控"Master Value(主值)"调整为多大时,舵机角度仍受该设置限制,无法增加。如同样将"Max positive/negative(最大正/负行程)"参数,调整为"正负40%",混控"Master Value(主值)"为"100%",此时,舵机角度将不受影响。

襟翼设置
DS24 没有单独的襟翼设置部分,襟翼设置均由"Servo Setup(舵机设置)"菜单完成,在襟翼通道下,分别关联"Subtrim(中立点微调)"、"Max positive/negative(最大正/负行程)"或"Max positive/negative limit(最大正/负行程限制)"三个参数。

当襟翼设置开关后,拨动开关,DS24 在参数可编辑状态下,会自动将光标跳转到需要调整的参数上。进入"Servo Setup(舵机设置)"菜单,并将上述三个参数任意一项选中为编辑状态(上图所示,可编辑状态为深红色),任意拨动开关位置,则光标会进行相应的跳转。根据光标跳转位置,旋转 3D 旋钮调整参数即可。注:调整襟翼舵机时,尽量将连杆断开,以免对舵机和舵面造成损坏。
Servo balancer
(舵机平衡器)
舵机平衡器功能,常用于多个舵机控制一个舵面的场景,每个舵机在出厂时,由于加工精度、软件参数等影响,难免做到同步一致性,使用此项功能,将能很好的解决这个问题。以副翼为例,当两个副翼舵机,同时拉动副翼舵面时,两个舵机在某一点行程不一致,舵机则会相互影响,导致电流增大,严重情况下会引起舵机电路板短路,甚至烧毁。
设置时,我们可任选一个舵机做为参考,首先,将"Servo No.(舵机通道编号)"更改为"Aileron 1(2)",选中"Servo balancer(舵机平衡器)"曲线框,单击 3D 旋钮进入设置。

当屏幕下方 Auto 选项为选中状态时,拨打副翼摇杆,设置点会随摇杆位置相应的移动,此时,只需通过 3D 旋钮调整曲线,直至两个舵机在任何位置下均不发生相互干扰的情况即可。

在设置过程中,点击屏幕下方 F2(Auto) 按钮,设置点将不会跟随摇杆进行相应的移动,此时,可通过 3D 旋钮以及 ESC 按钮进行设置点的左右移动,当移动到需要设置的位置后,转动 3D 旋钮,即可调整曲线。

进行同步性设置时,我们建议将同一类型的通道设置为同一输出组,通过这种方式,在同一输出组的通道输出将同时接收控制信号,确保同步一致性。
此步,需要使用"Device Explorer(资源管理器)"菜单进行操作,所以必须对接收机通电,否则无法使用该菜单。点击 Menu 按钮,选择"Fine Tuning(微调)"菜单,进入"Device Explorer(资源管理器)"。

进入"Device Explorer(资源管理器)"菜单后(下图①),选择接收机,点击 3D 按钮进入接收机设置。注:此处设置部分,后期文章会有详细介绍,此处将不再阐述。进入接收机设置页面后(下图②),选择"Receiver Outputs(接收机输出)"选项,点击 3D 按钮进入接收机输出设置。

在接收机输出页面,将相同类别的通道归并到同一组,我们以副翼为例,上图③中,"OutPin 2"、"OutPin 3"为副翼两个通道,默认情况下不在同一输出组。旋转 3D 旋钮,选择"OutPin 3",将 Group 更改为"OutPin 2"同一输出组 B(上图④),这样,两个副翼通道将会归并在同一输出组内。其他通道以此类推即可。

以上,为 JETI DS24 通道(舵机)参数设置讲解,如有任何疑问或问题,可识别下方二维码,关注本站微信公众号进行提问。

【模谷】 版权所有 未经协议授权 禁止转载 违者必究!
 湘公网安备 43010402000813号
湘公网安备 43010402000813号